About Learning Robotics using Python
If you are an engineer, a researcher, or a hobbyist, and you are interested in robotics and want to build your own robot, this book is for you. Readers are assumed to be new to robotics but should have experience with Python..
Learning about robotics will become an increasingly essential skill as it becomes a ubiquitous part of life. Even though robotics is a complex subject, several other tools along with Python can help you design a project to create an easy-to-use interface.
Learning Robotics Using Python is an essential guide for creating an autonomous mobile robot using popular robotic software frameworks such as ROS using Python. It also discusses various robot software frameworks and how to go about coding the robot using Python and its framework. It concludes with creating a GUI-based application to control the robot using buttons and slides.
By the end of this tutorial, you'll have a clear idea of how to integrate and assemble all things into a robot and how to bundle the software package.
- Understand the core concepts and terminologies of robotics
- Create 2D and 3D drawings of robots using freeware such as LibreCAD and Blender
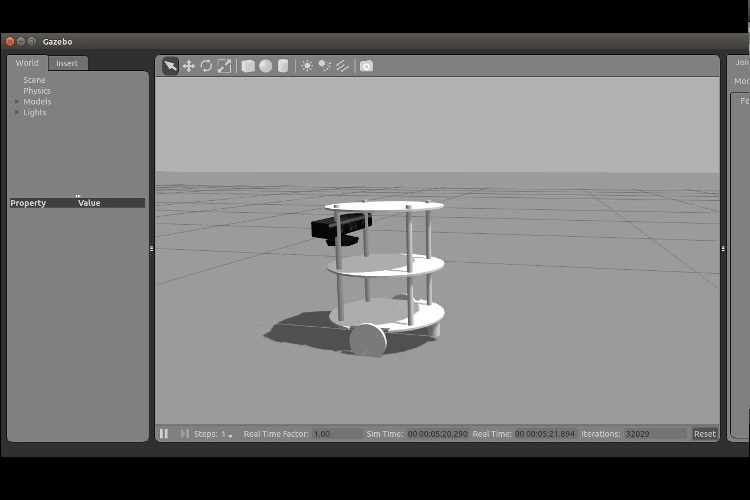
- Simulate your robot using ROS and Gazebo
- Build robot hardware from the requirements
- Explore a diverse range of actuators and its interfacing
- Interface various robotic sensors to robots
- Set up and program OpenCV, OpenNI, and PCL to process 2D/3D visual data
- Learn speech processing and synthesis using Python
- Apply artificial intelligence to robots using Python
- Integrating Robotic Hardware and Software
- Build a robot control GUI using Qt and Python
- Calibration and testing of robot
Book Details
- First Published : May 2015
- Production Reference : 1220515
- Publisher : Packt Publishing Ltd, UK
- ISBN : 978-1-78328-753-6
- Author : Lentin Joseph
- Reviewers : Avkash Chauhan, Vladimir Iakovlev
- Reviewers : Blagoj Petrushev, Marek Suppa
- Commissioning Editor : Rebecca Youe
- Acquisition Editor : Rebecca Youe
- Content Development Editor : Athira Laji
- Technical Editors: Ankur Ghiye, Manali Gonsalves
- Copy Editors : Pranjali Chury, Relin Hedly, Merilyn Pereira, Adithi Shetty
- Project Coordinator : Harshal Ved
- Proof readers : Stephen Copestake, Safis Editing
- Indexer : Priya Sane
- Graphics : Sheetal Aute
- Production Coordinator : Nitesh Thakur
- Cover : Nitesh Thakur
- What is a robot?
- Where do robots come from?
- What can we find in a robot?
- How do we build a robot?
- Summary
- The Requirements of a service robot
- Robot drive mechanism
- Installing LibreCAD, Blender, and MeshLab
- Creating a 2D CAD drawing of the robot using LibreCAD
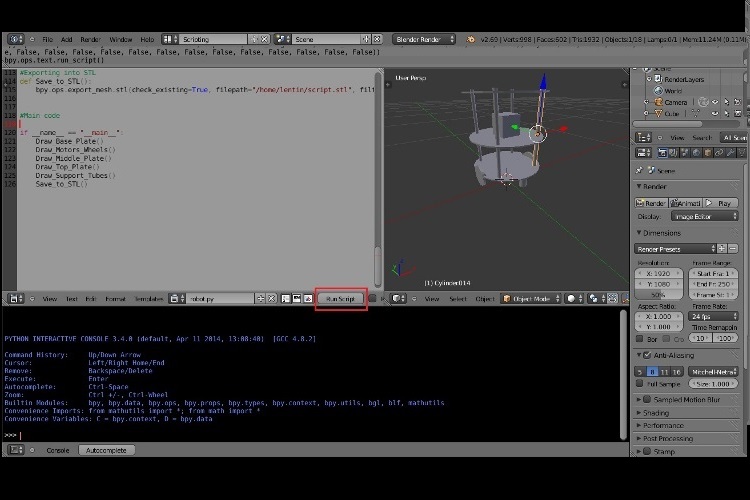
- Working with a 3D model of the robot using Blender
- Questions
- Summary
- Understanding robotic simulation using ROS
- Questions
- Summary
- Specifications of the ChefBot hardware
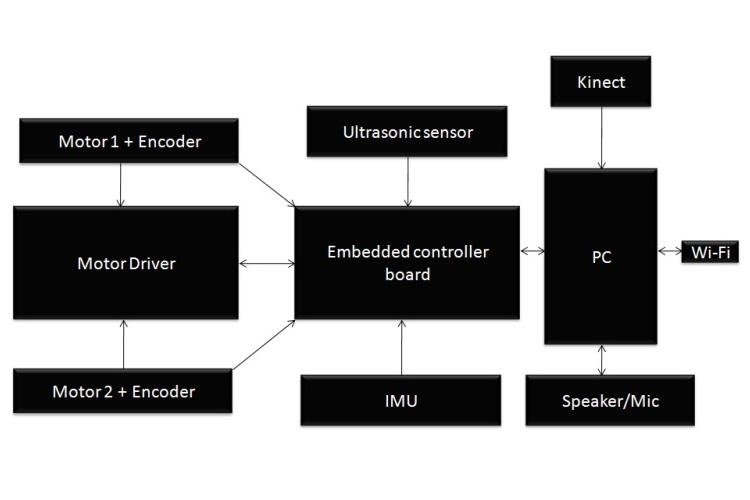
- Block diagram of the robot
- Working of the ChefBot hardware
- Questions
- Summary
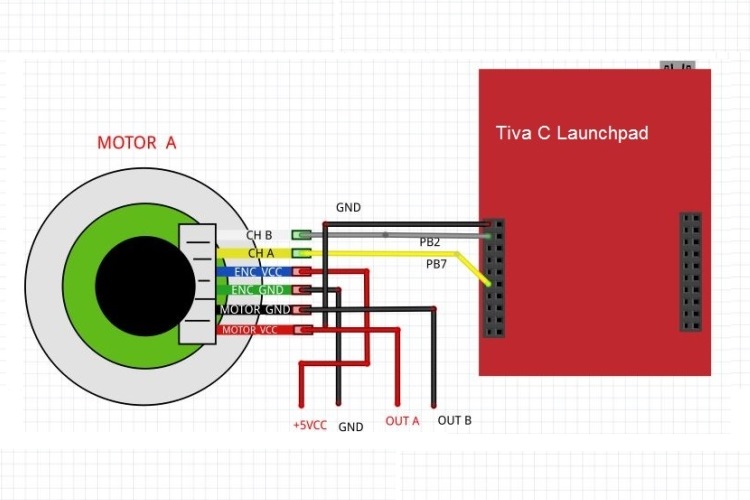
- Interfacing DC geared motor with Tiva C LaunchPad
- Interfacing quadrature encoder with Tiva C Launchpad
- Working with Dynamixel actuators
- Questions
- Summary
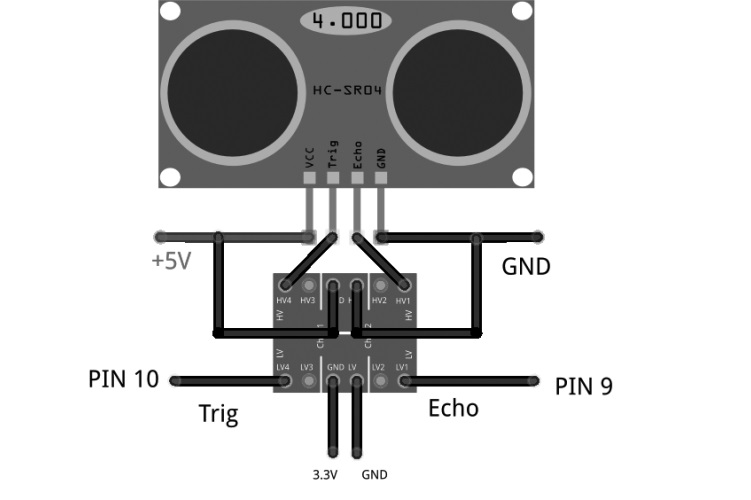
- Working with Ultrasonic distance sensors
- Working with the IR proximity sensor
- Working with Inertial Measurement Unit
- Interfacing MPU 6050 to Launchpad with the DMP support using Energia
- Questions
- Summary
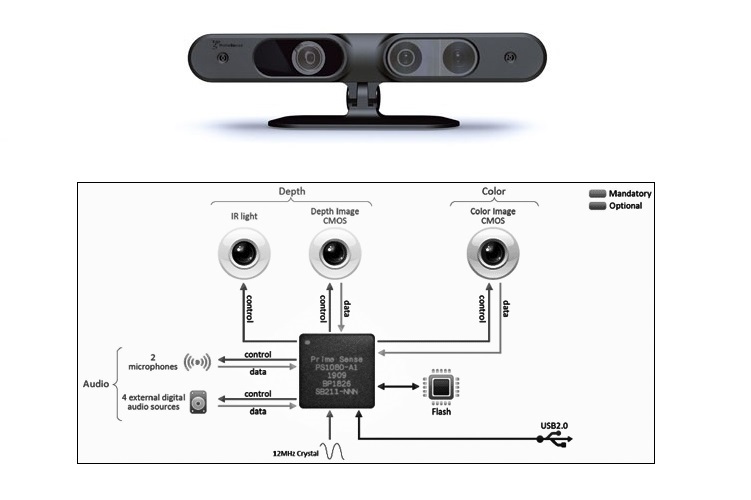
- List of robotic vision sensors and image processing libraries
- Introduction to OpenCV, OpenNI, and PCL
- Programming Kinect with Python using ROS, OpenCV, and OpenNI
- Working with Point Clouds using Kinect, ROS, OpenNI, and PCL
- Conversion of Point Cloud to laser scan data
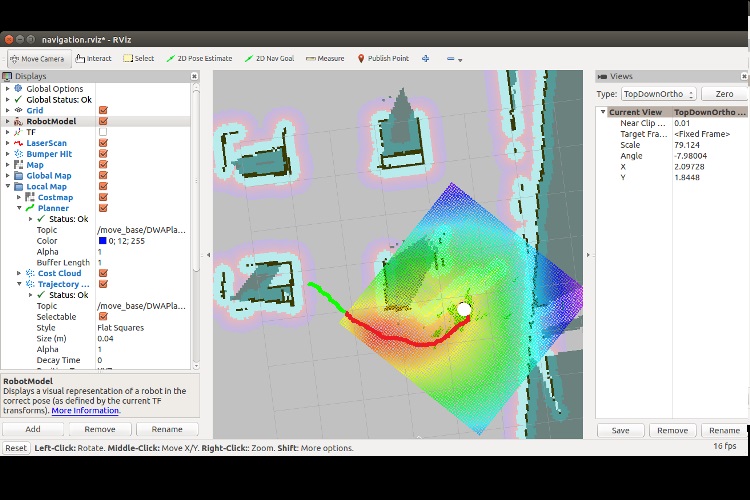
- Working with SLAM using ROS and Kinect
- Questions
- Summary
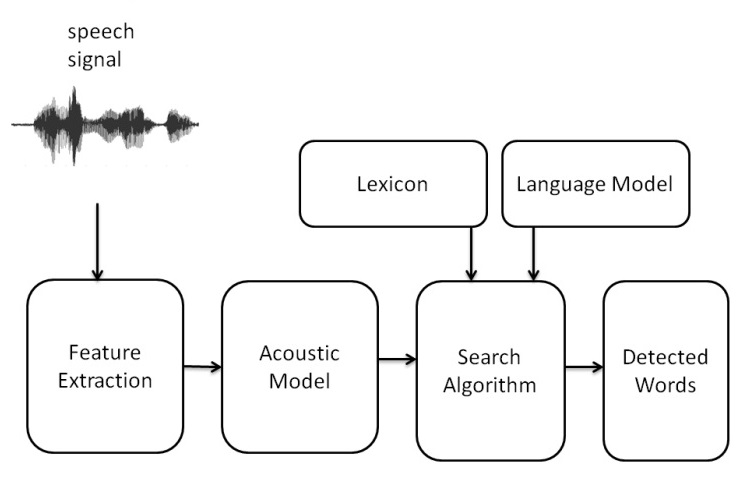
- Understanding Speech Recognition
- Working with speech recognition and synthesis in Ubuntu 14.04.2 using Python
- Real-time speech recognition using Pocket Sphinx, GStreamer, and Python in Ubuntu 14.04.2
- Speech recognition using Julius and Python in Ubuntu 14.04.2
- Working with speech recognition and synthesis in Windows using Python
- Working with Speech recognition in ROS Indigo and Python
- Working with Speech synthesis in ROS Indigo and Python
- Questions
- Summary
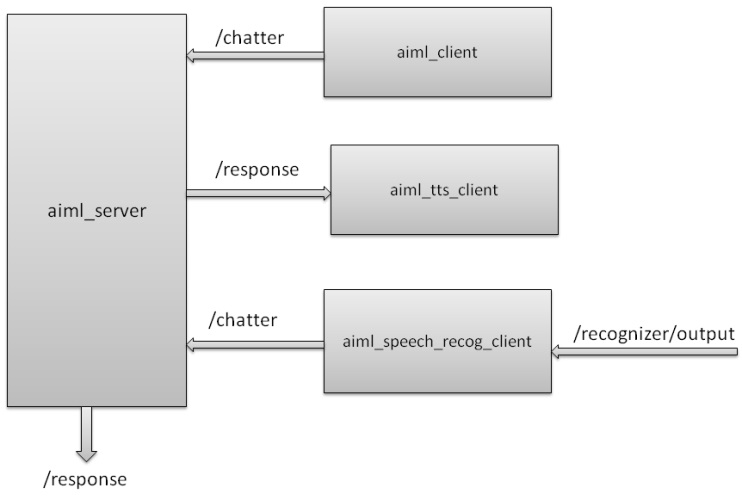
- Block diagram of the communication system in ChefBot
- Introduction to AIML
- Introduction to PyAIML
- Working with AIML and Python
- Working with A.L.I.C.E. AIML files
- Integrating PyAIML into ROS
- Questions
- Summary
- Building ChefBot hardware
- Configuring ChefBot PC and setting ChefBot ROS packages
- Interfacing ChefBot sensors with Tiva C LaunchPad
- Writing a ROS Python driver for ChefBot
- Understanding ChefBot ROS launch files
- Working with ChefBot Python nodes and launch files
- Questions
- Summary
- Installing Qt on Ubuntu 14.04.2 LTS
- Working with Python bindings of Qt
- Working with PyQt and PySide
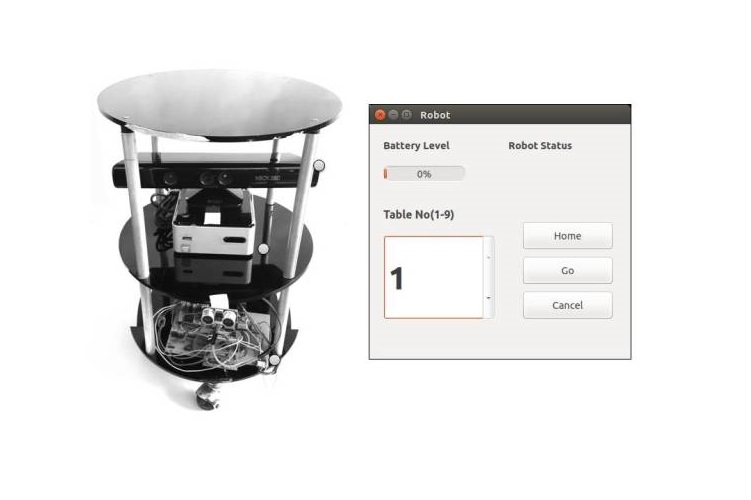
- Working with ChefBot's control GUI
- Questions
- Summary
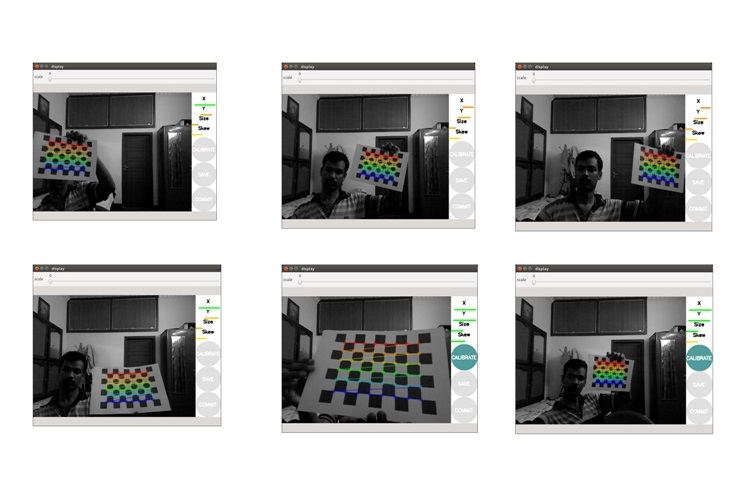
- The Calibration of Xbox Kinect using ROS
- The Calibration of Xbox Kinect using ROS
- Calibrating the MPU 6050
- Testing of the robot using GUI
- Questions
- Summary